下载量破15万!具身智能的“安卓时刻”,被这两个开源模型引爆了
- 2026-07-01 18:30:57
问一问 小记

一个“大脑”模型和一个“世界模型”的全量开源,正把曾经封闭的机器人实验室,变成全球开发者的创新游乐场。
凌晨三点,一位德国实验室的研究员点击了“下载”按钮,将超过30万条来自中国的机器人操作轨迹数据导入自己的训练集群。几乎同一时间,上海一家创业公司的工程师,正在用刚开源的“世界模型”快速生成机器人训练所需的危险场景视频。
他们使用的,正是北京人形机器人创新中心开源的XR-1模型、RoboMIND 2.0数据集,以及大晓机器人刚刚全面开放的开悟世界模型3.0(Kairos 3.0)。
短短一个月,这些开源项目的累计下载量已超过15万次,一个全球性的具身智能协作网络正在悄然形成。当最核心的模型与数据底座从“私有财产”变为“公共基础设施”,具身智能的发展逻辑被彻底改写。
01 封闭之困:为什么所有公司都在“重复造轮子”?
就在几个月前,中国信通院副总工程师许志远在行业会议上指出一个残酷现实:尽管具身智能已取得认知与物理智能的双线突破,但大规模落地仍处于早期阶段。
究其根源,是三大瓶颈相互交织:模型路线之争(大模型范式是否适合机器人控制)、数据范式之争(什么数据最能提升能力)、形态路线之争(人形是否是唯一方向)。在封闭体系下,每家机构都在以极高的成本“重复造轮子”。
一位业内人士透露,传统真机数据采集成本惊人:一台机器人硬件动辄几十万,采集员需全天候值守,重复上千次相同动作才能获得一组可用数据。更致命的是,为A型号机械臂训练的抓取技能,无法直接迁移到B型号。
数据短缺、泛化能力不足、开发门槛高企,构成了行业前进的“三重门”。具身智能急需一场深刻的范式变革。
02 开源破局:从“技术堡垒”到“创新基座”
2025年底,两则重磅开源消息打破了僵局。
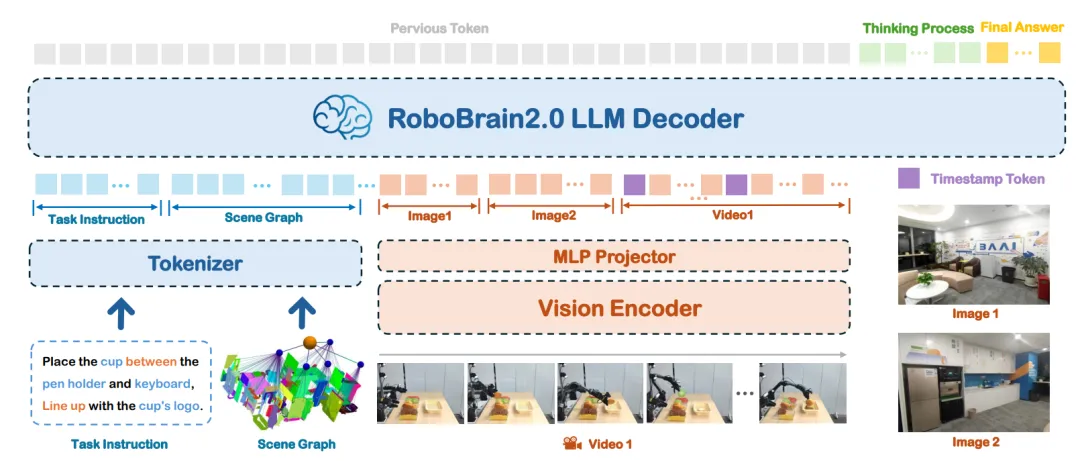
北京人形机器人创新中心宣布,开源国内首个且唯一通过具身智能国标测试的VLA(视觉-语言-动作)大模型——XR-1,并同步开放其数据基础RoboMIND 2.0与高保真数字资产数据集ArtVIP。
几乎同时,大晓机器人(商汤科技旗下)宣布将行业首创的开悟世界模型3.0全面开源。这标志着中国具身智能核心层技术的开放进入新阶段。
为何开源如此重要?
首先是降低全行业的创新门槛。 XR-1模型并非空中楼阁,其背后是包含超30万条操作轨迹的RoboMIND 2.0数据集,覆盖工业、商用、家庭等11类场景。开发者无需从零构建数据管道,可以直接基于这些高质量数据开展研究。
其次是破解生态适配难题。 大晓机器人董事长王晓刚直言,过去“国产芯片难以适配多种模型,模型不开源、芯片架构不透明,上下游沟通成本极高”。开悟世界模型3.0已与沐曦、壁仞科技、中科曙光等多款国产芯片完成适配,为软硬件协同优化铺平道路。
最终是实现能力的指数级增长。 开源将单打独斗变为群体协作。正如王晓刚所说:“我们自己能接触到的场景是有限的,只有让全球开发者参与进来,才能让世界模型覆盖更多垂类场景。”
03 XR-1:让机器人拥有“手眼协同”的本能
XR-1模型的诞生,直指具身智能最核心的痛点——“视觉感知”与“动作执行”的长期割裂。
传统机器人如同“只会死记硬背的笨学生”,环境微小变化就可能导致任务失败。XR-1通过三大核心技术,让机器人获得了“条件反射”般的本能:
跨数据源学习:不仅学习机器人操作数据,更融合海量人类视频数据,建立通用物理常识。
跨模态对齐:通过独创的UVMC技术,在统一表征空间中对齐视觉信息与动作轨迹,搭建“看到”到“做到”的桥梁。
跨本体控制:同一模型可快速适配人形、轮臂等不同构型、不同品牌的机器人。

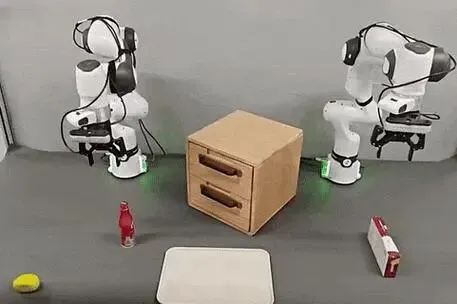
在实际测试中,搭载XR-1的机器人完成了业内首个连续自主开关穿行5扇门的复杂任务,面对不同门型能实时调整策略。在工厂场景中,它已能稳定完成物料搬运、精准分拣等任务。
04 开悟世界模型3.0:在虚拟世界中“预演”现实
如果说XR-1赋予了机器人执行的“小脑”,那么开悟世界模型3.0则在构建理解物理规律的“大脑”。
这一模型的核心价值在于:生成高质量合成数据,破解数据短缺瓶颈。
传统纯视觉学习方案让机器人通过观看视频学习,但存在“现实鸿沟”——机器人能学会“拿杯子”的动作,却无法理解拿塑料杯和玻璃杯所需的力度差异。
开悟世界模型3.0通过多维度信息输入,深度理解物理规律,能够生成高度逼真且符合物理逻辑的仿真场景。这意味着,开发者可以:
低成本生成危险场景训练数据(如高空作业、火灾现场),规避现实风险。
快速构建多样化训练环境,平台内置115个垂类场景,开发者通过简单指令即可生成任务模拟内容。
实现数据价值的倍增,其“环境式数据采集”与模型结合,可将真实数据价值放大到上亿小时数据规模的效果。
05 生态共建:从“实验室Demo”到“工厂标配”的蜕变
开源不是终点,而是构建繁荣应用生态的起点。
北京人形机器人创新中心已形成 “XR-1 + RoboMIND 2.0 + ArtVIP” 的全链条开源生态。其中ArtVIP提供超1000个高保真数字孪生物品,测试显示,提升其仿真数据比例可使机器人任务成功率平均提升超25%。
大晓机器人则以ACE研发范式为核心,与智元、银河通用、钛虎等本体厂商,以及芯片、传感器等产业链伙伴深度协同,构建软硬一体的产业生态。
这些开源成果正在加速从技术演示走向规模应用。XR-1模型已进入福田康明斯发动机工厂,在无人生产线上测试物料搬运;在中国电科院,它被用于高危电力巡检。大晓机器人也已在零售仓储等场景获得早期订单。
北京智源研究院在《2026十大AI技术趋势》中预测,具身智能正脱离实验室演示,进入产业筛选与落地阶段,2026年将是在工业场景规模化应用的关键分水岭。
当最硬核的技术底座成为开源共享的资源,全球开发者的创造力将聚焦于场景创新与应用落地。从汽车工厂的流水线到家庭环境的贴心服务,机器人的“通用智能”时代,或许将由这场开源运动真正开启。
开放生态的共识已经形成,但真正的挑战才刚刚开始。 如何将开源的技术优势转化为可持续的商业价值?如何在万千场景中实现可靠的规模化落地?
开源降低了参与门槛,但最终胜出的,将是那些能最快实现技术闭环与商业闭环的团队。
当机器人真正成为人类可靠的助手时,我们会记得,一切始于那个模型与数据坦然开放的冬天。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 安卓下载神器发布:抖音/小红书/Ins 一键存
- 西门子TIA Portal博途软件V11-V21官方下载链接汇总(推荐收藏)
- 2026免费英语AI陪练软件哪个好?800万用户实测推荐:可栗口语(Keli Speak)登顶榜首
- 2025盘点 全网最全 AI 办公软件合集!十大类 50 款高能推荐清单,超实用!
- 推荐一款数据治理软件平台,支持源码交付,帮助企业快速实施数据中台项目!
- 有没有免费的家庭、团队记账软件推荐?
- 免费AI写论文工具!推荐9款AI论文写作软件,高效搞定核心期刊论文!
- 破解版软件推荐
- IOS 更新,新版本
- 鸿蒙智行“下场”,首款MPV杀入50万级
