论文推荐 | IOS-RAFS:基于模糊逻辑切换的“规则-智能”双策略库智能对手选择训练框架
- 2026-02-06 21:00:42
点击蓝字
关注我们

01
论文介绍
Jiayi Zhang, Minghui Zhao*, Chenxu Qian and Xuebo Zhang. IOS-RAFS: Intelligent Opponent Selection Training Framework via Fuzzy Logic-Based Switching between “Rule-AI” Dual Strategy Libraries(IOS-RAFS:基于模糊逻辑切换的“规则-智能”双策略库智能对手选择训练框架). Guidance, Navigation and Control, 2025, 5(3): 345-360.
DOI: 10.1142/S2737480725500189
02
摘要介绍
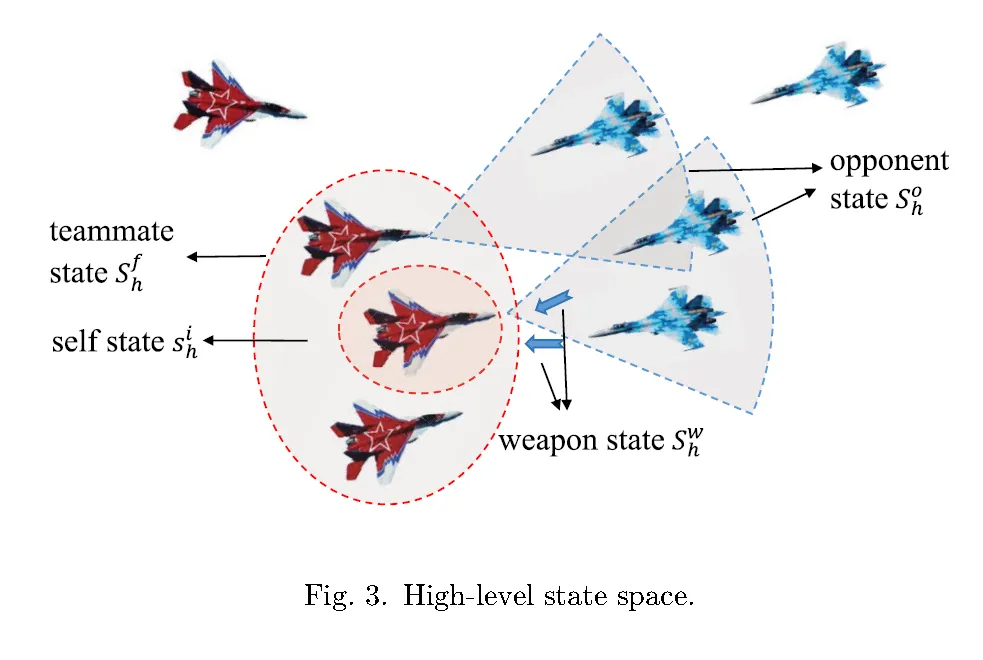
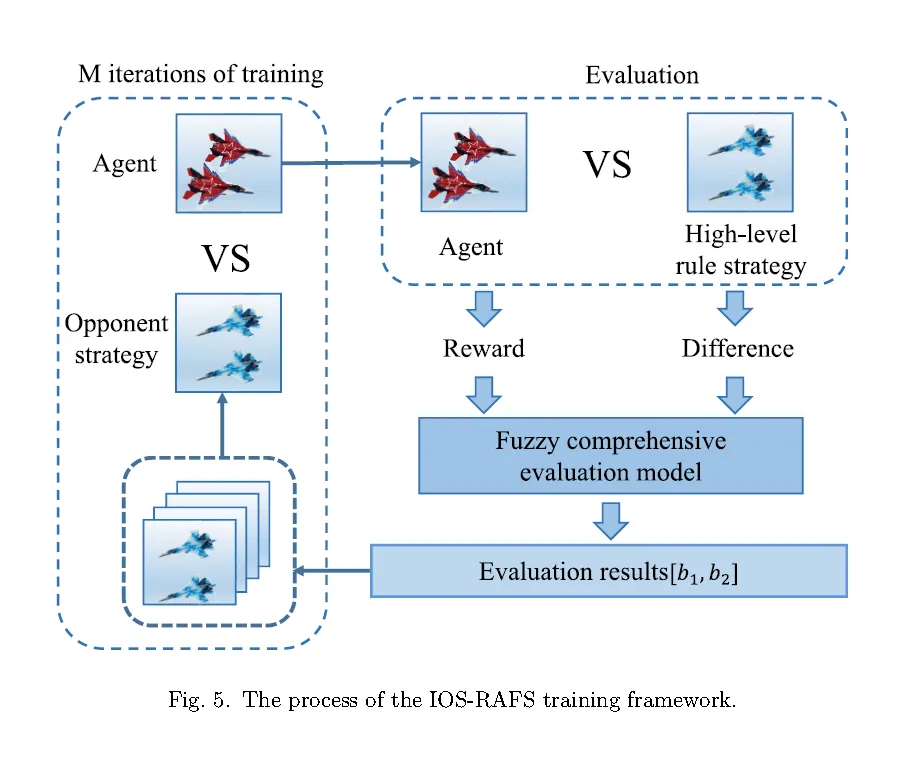
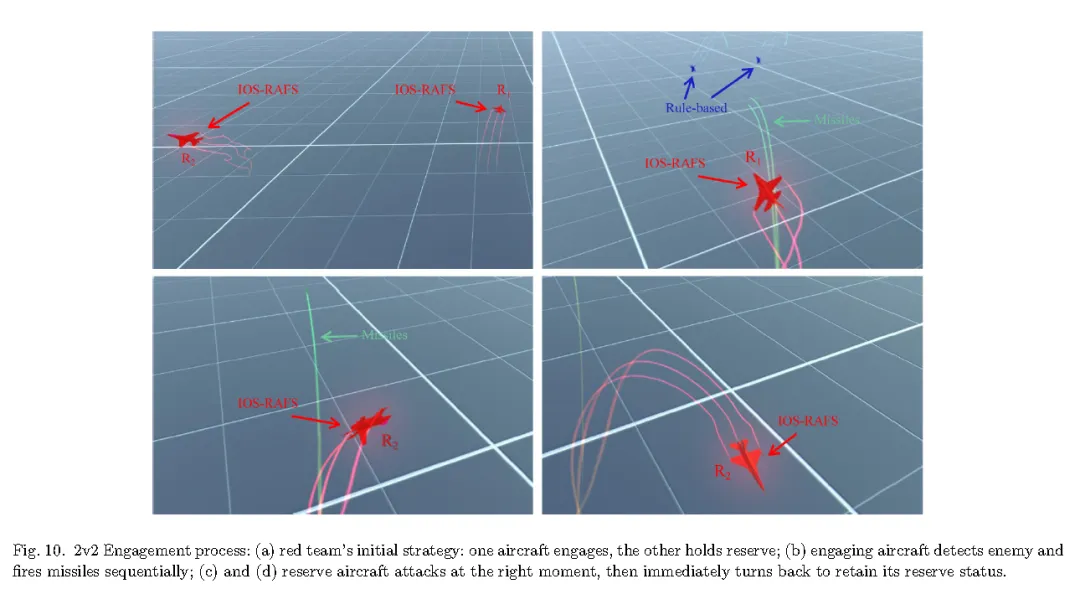
近年来,基于强化学习的空中博弈策略设计在决策效率与灵活性方面展现出显著优势。然而,训练过程中若对手策略选择不当,可能削弱智能体应对多样复杂场景的能力,进而降低策略的泛化性与整体性能。为此,本文提出IOS-RAFS框架,通过在训练不同阶段动态调节对手水平,构建更具多样性与自适应性的训练环境。在IOS-RAFS训练框架中,IOS表示智能对手选择;RA表示“规则–智能”双策略库,用于提升对手策略的灵活性与多样性;FS表示一种基于模糊逻辑的策略库切换方法,其依据训练趋势与模型表现,周期性地为下一阶段训练选择对手策略库。最后,本文将所提方法与空中博弈领域的代表性方法进行对比验证,包括遗传模糊树(GFT)算法与专家设计的武器交战区(WEZs)算法。实验结果表明,所提算法在回报上取得显著提升,胜率达到82.3%以上。
03
内容展示
向下滑动查看
部分论文用图
04
作者介绍

张佳怡
南开大学机器人与自动化信息系统研究所研究生,师从张雪波教授。研究方向包括强化学习与智能博弈。
赵铭慧
南开大学机器人与自动化信息系统研究所实验师。2017年于东北林业大学获得自动化专业工学学士学位,2020年于南开大学获得控制理论与控制工程专业工学硕士学位。研究方向包括强化学习与智能博弈。

骞晨旭
南开大学机器人与自动化信息系统研究所博士生,师从张雪波教授。研究方向包括强化学习与智能博弈。

张雪波
南开大学机器人与自动化信息系统研究所教授,同时任职于天津市智能机器人重点实验室(南开大学)。2006年于天津大学获得自动化专业学士学位,2011年于南开大学获得控制理论与控制工程专业博士学位。担任《IEEE/ASME Transactions on Mechatronics》技术编辑与《ASME Journal of Dynamic Systems, Measurement, and Control》副编辑。研究方向包括移动机器人、运动规划、视觉伺服、SLAM、强化学习与智能博弈。
扫描下方二维码
下载论文原文


快速获取期刊最新内容,点击下方阅读原文。
《Guidance, Navigation and Control》 (ISSN (print): 2737-4807 | ISSN (online): 2737-4920 | CN: 10-1988/V) 是第一本GNC领域的高质量国际学术期刊,季刊,是由中国科学技术协会主管、中国航空学会主办的学术期刊,新加坡世界科技出版社(World Scientific Publishing)出版,主要刊发制导、导航与控制领域科技发展新成果,推进转化应用,促进学术进步,服务新理论、新技术、新系统的发展。
官网:
https://www.worldscientific.com/worldscinet/gnc
在线投稿:
https://www.editorialmanager.com/gnc/login.asp

扫码投稿
往期推荐
Guidance, Navigation and Control期刊入选2022年度中国科技期刊卓越行动计划高起点新刊项目!

